








Description
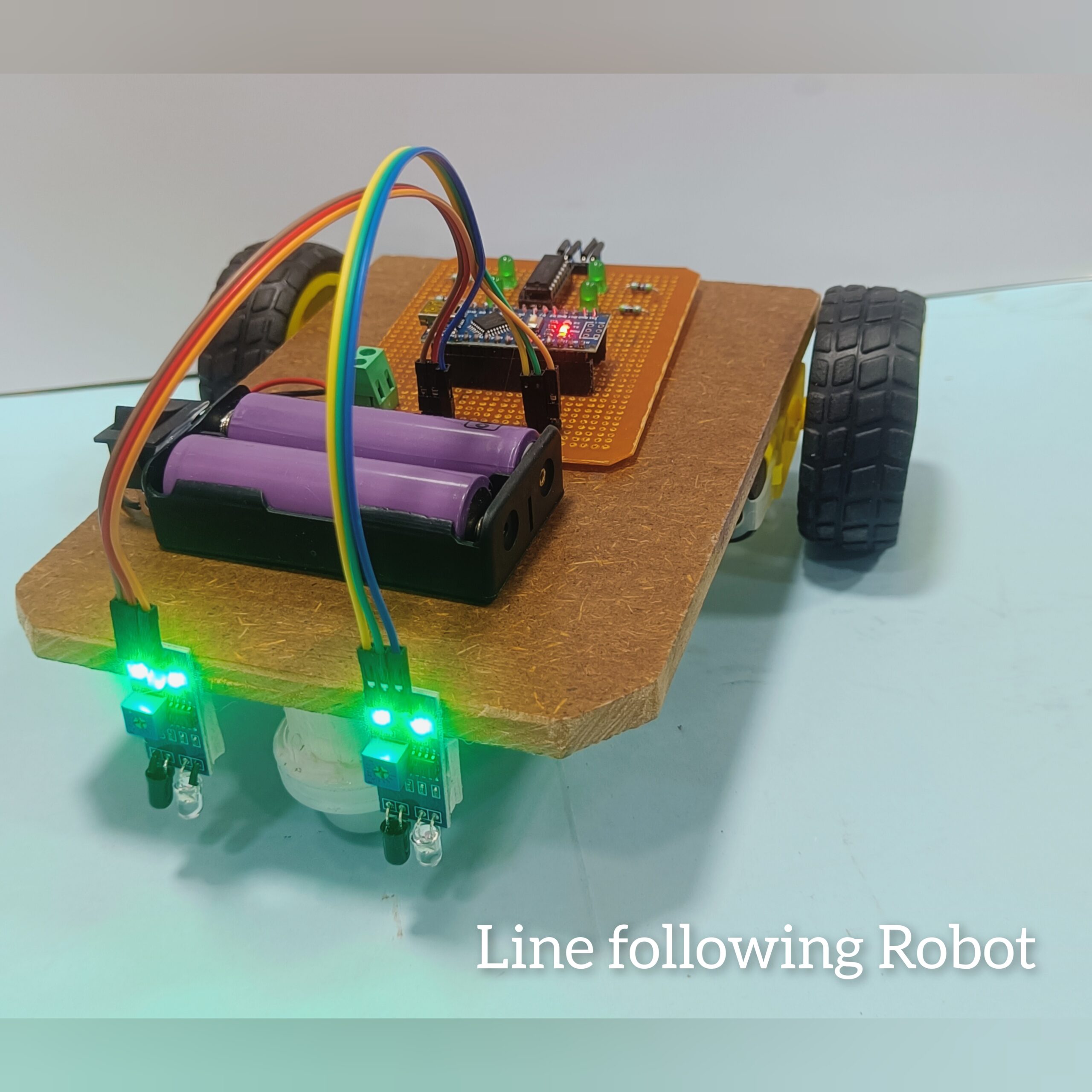
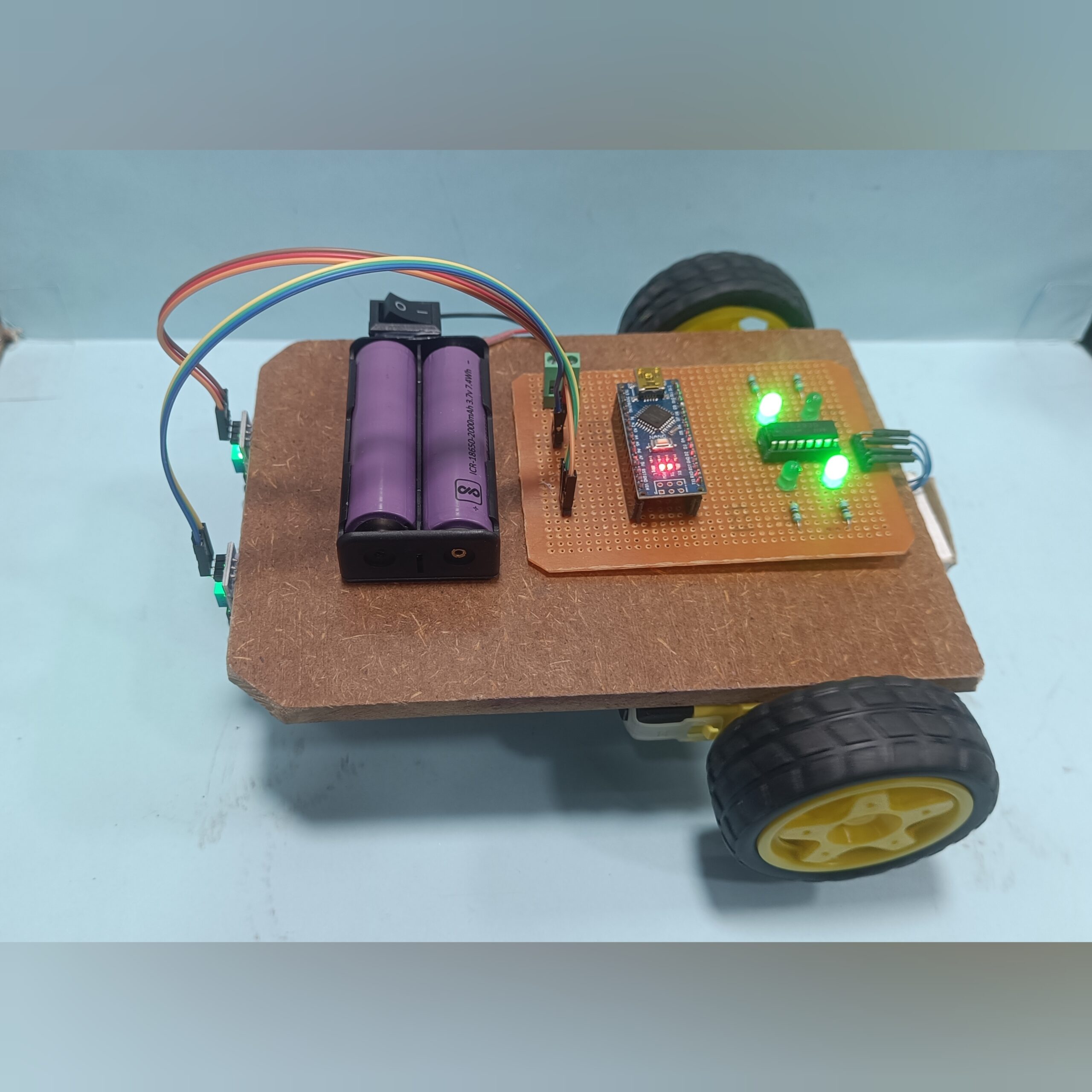
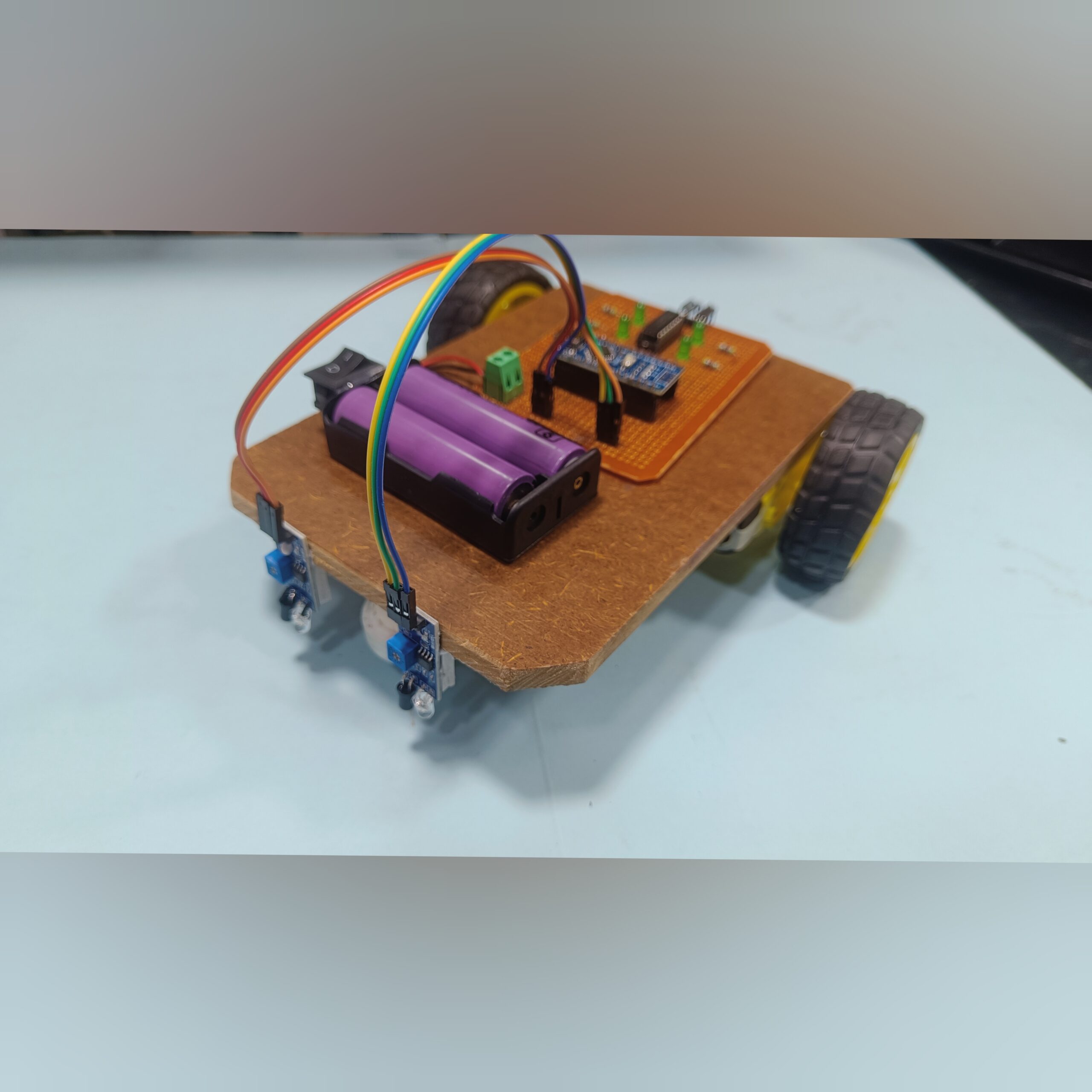
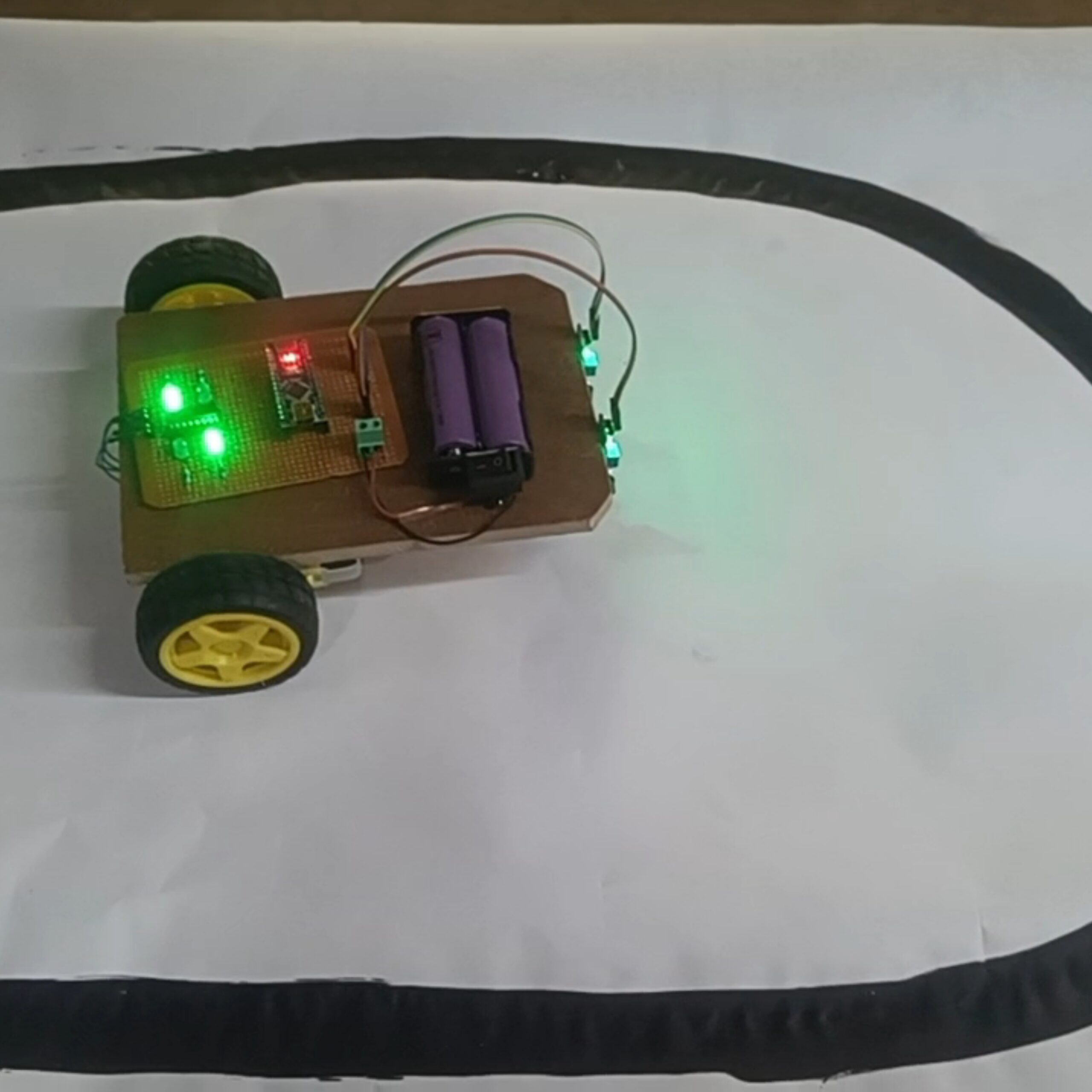
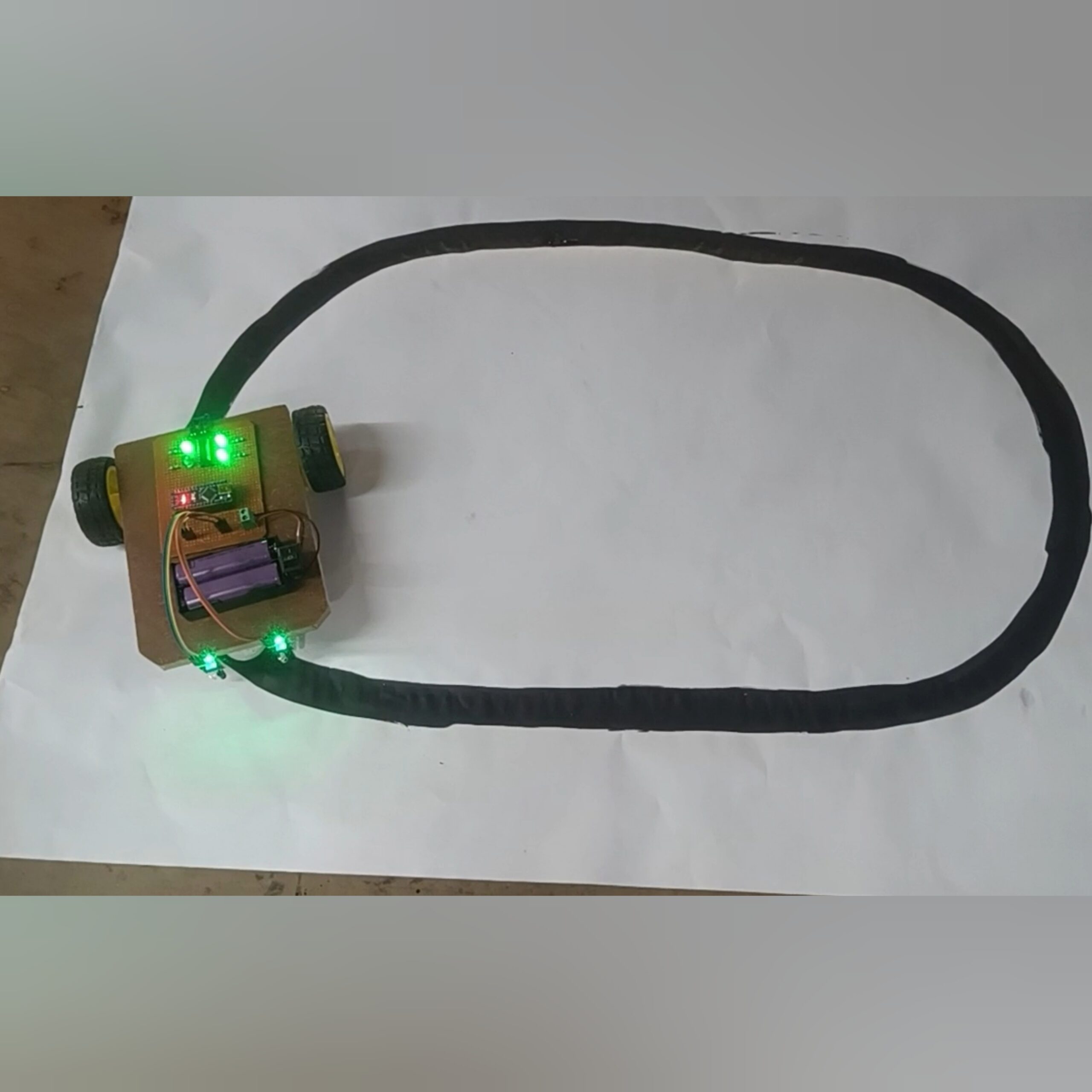
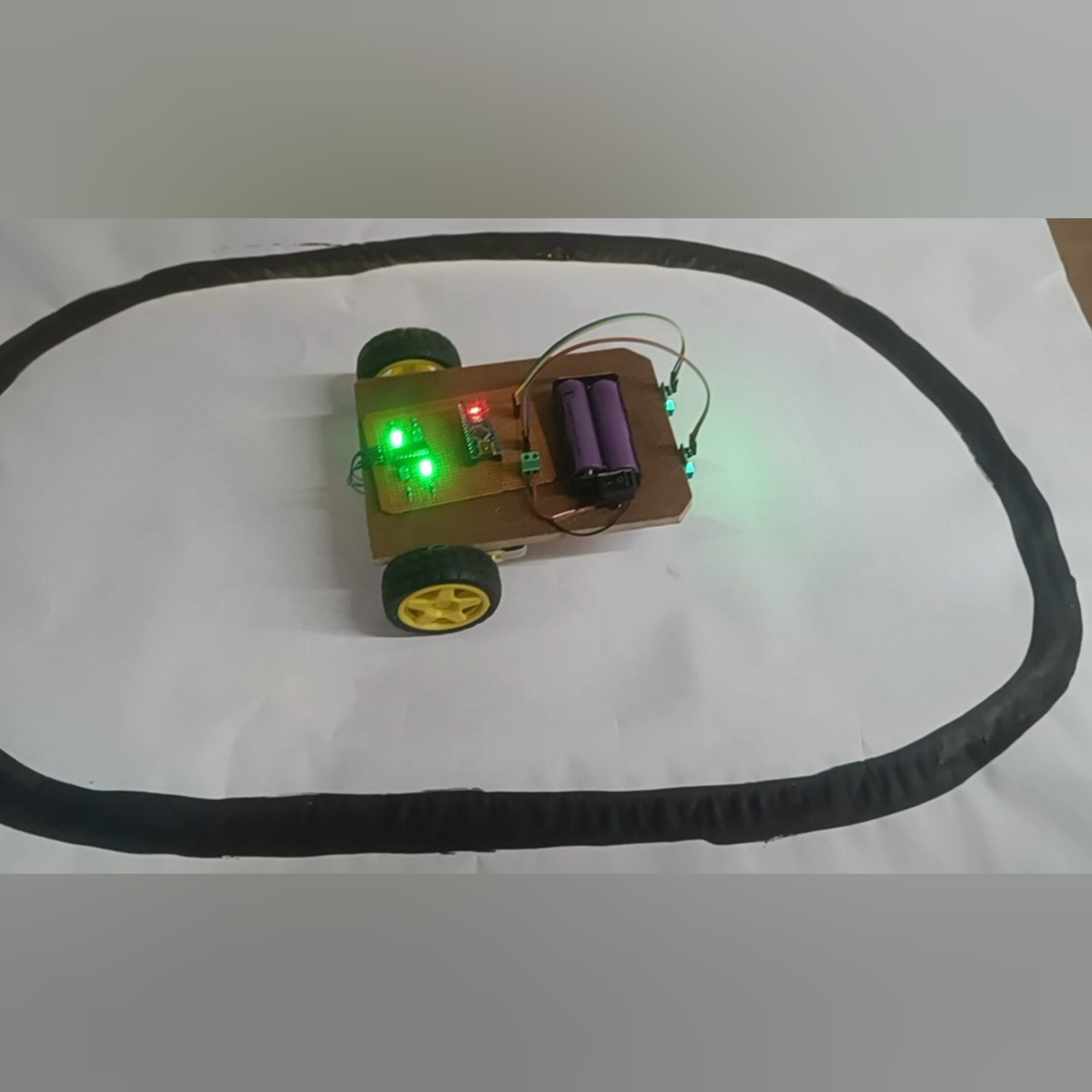
This Line Following Robot is built around an Arduino Uno/Nano board, which acts as the brain of the system. Two IR sensors are mounted at the front to detect a black line on a white surface or vice versa. Based on the sensor readings, the Arduino sends commands to an L293D motor driver to control two slow RPM DC motors with rubber tyres for precise movement. The robot uses two 18650 lithium-ion cells (in series or parallel) for power. A castor wheel at the front or rear provides balance and smooth turning. The robot follows a predefined path (black line) autonomously without human intervention.
Key components used:
· Arduino (Uno/Nano)
· L293D motor driver
· 2 IR sensors
· 2 slow RPM motors + rubber tyres
· 2 x 18650 Li-ion cells
· 1 castor wheel
5 Applications (Where to Use)
1. Industrial automation – Transport small components along marked lines on factory floors.
2. Restaurant / hospital delivery – Carry food or medicine trays along coloured floor paths.
3. Educational robotics – Teach students about sensors, embedded systems, and control logic.
4. Warehouse sorting – Guide trolleys along tape lines to move goods to different sections.
5. Theme parks / museums – Animate guided tour bots that follow floor markings for direction.
How to Enhance This Robot (Future Upgrades)
· Add Bluetooth / Wi-Fi module – Control manually or set multiple path points via smartphone.
· Increase sensor array – Use 5–8 IR sensors for smoother line following and sharp turn detection.
· Add PID control logic – Replace simple on/off steering with proportional–integral–derivative algorithm for faster, wobble-free motion.
· Use rechargeable battery management system (BMS) – Protect 18650 cells from overcharge/discharge.
· Mount a small camera (OpenMV or ESP32-CAM) – For colour line following or QR code-based path switching.
· Add obstacle detection – Ultrasonic sensor to stop if something blocks the line.
· Implement speed control with PWM – Make turns smoother by slowing down one motor instead of stopping it.
· Add buzzer or LED indicators – Show robot status (calibration, line lost, power low).
· Create a multi-line junction logic – Allow robot to decide left/right based on pre-programmed instructions.
· Replace castor with a second driven wheel – Convert to differential drive for better traction on rough surfaces.

Reviews
There are no reviews yet.